Cùng với sự tiến bộ của công nghệ thông tin, robot ngày càng đóng vai trò quan trọng trong sản xuất thông minh, hệ thống vận chuyển thông minh, internet vạn vật, dịch vụ thông minh và sức khỏe y tế.
Trong những năm gần đây, robot di động được ứng dụng rộng rãi trong các lĩnh vực của đời sống xã hội, phục vụ hoạt động vận chuyển trong các phân xưởng, nhà ga, bệnh viện, bến cảng và các trung tâm vận chuyển hàng hóa, với nhiều ưu việt: Nâng cao hiệu quả trong môi trường làm việc và giảm chi phí nhân công; Tiết kiệm năng lượng và giảm chi phí bảo trì hệ thống; giảm thiểu hư hỏng cho sản phẩm vì robot được lập trình chuyển động có thể đạt độ chính xác vị trí cao; Tăng mức độ an toàn vì quá trình chuyên chở, đóng gói vật liệu không có sự can thiệp của con người, giảm thiểu tai nạn lao động và có thể điều chỉnh linh hoạt.
Nhận thấy vai trò và tầm quan trọng của trí tuệ nhân tạo trong sự phát triển xã hội hiện nay, cùng với vấn đề về nghiên cứu các giải thuật thông minh đối với robot di động được giới khoa học ngày càng quan tâm, nhóm sinh viên Khoa Cơ khí – Trường Đại học Công nghiệp Hà Nội triển khai thực hiện đề tài “Nghiên cứu phương pháp học tăng cường ứng dụng cho bài toán định vị robot di động làm việc trong môi trường không xác định”. Kết quả, đề tài đã được Hội đồng nghiệm thu đánh giá cao, đạt Giải Nhất cuộc thi sinh viên Nghiên cứu khoa học lần thứ XIII.
Chia sẻ về đề xuất, triển khai thực hiện đề tài, bạn Nguyễn Hồng Sơn - Trưởng nhóm cho biết, do sớm được tiếp cận với robot di động và các thiết bị chất lượng cao, cùng với các hướng nghiên cứu, nhóm tác giả đã xác định, phương pháp nghiên cứu chính là kết hợp giữa nghiên cứu lý thuyết và nghiên cứu thực nghiệm. Trong đó, nghiên cứu lý thuyết cơ sở của bài toán định vị cho robot di động và phương pháp học tăng cường, từ đó đề xuất giải pháp cho thực hiện đề tài. Nghiên cứu thực nghiệm nhằm đánh giá độ chính xác, tin cậy và sự ổn định của các thuật toán cũng như giải pháp về thiết bị phần cứng của đề tài.
Sau khi thực hiện quá trình huấn luyện robot ở chương trình mô phỏng, nhóm nghiên cứu dưới sự hướng dẫn của TS. Nguyễn Anh Tú dùng tập giá trị đào tạo được sử dụng cho quá trình tránh vật cản của robot ở môi trường thực.
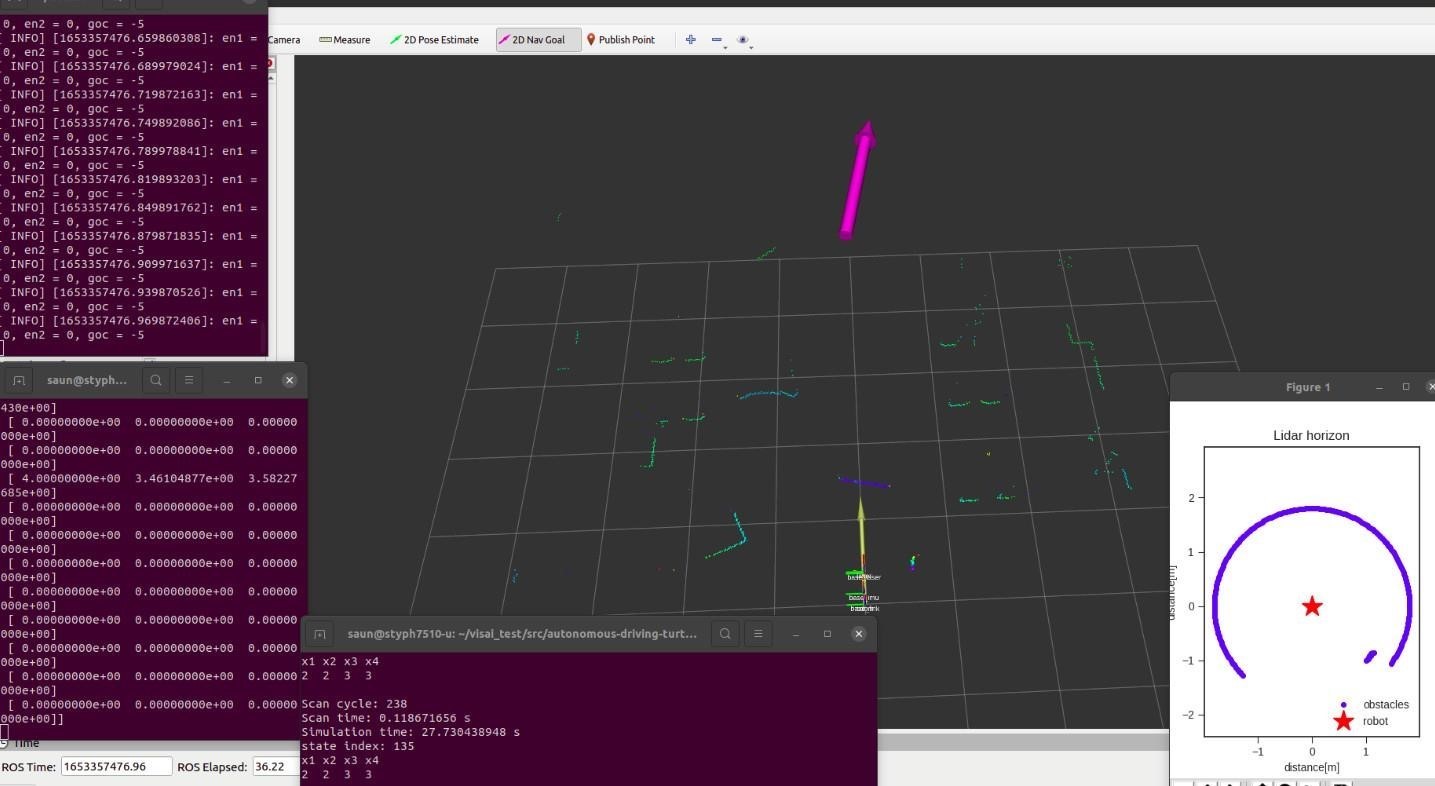
Điểm gốc khi robot bắt đầu khởi động và lựa chọn điểm goal bất kì

Điểm gốc là vị trí robot khi khởi động
Đặt goal là 1 điểm bất kì người điều khiển có thể đặt ở môi trường chưa biết trước. Điểm goal được thể hiện bằng mũi tên màu tím trong hình. Điểm đến là gốc của mũi tên, hướng của robot trùng với hướng của mũi tên. Robot thực hiện quá trình di chuyển đến điểm đặt, đồng thời phát hiện và tránh những chướng ngại vật trên đường đi.

Quá trình tránh vật cản của robot khi di chuyển
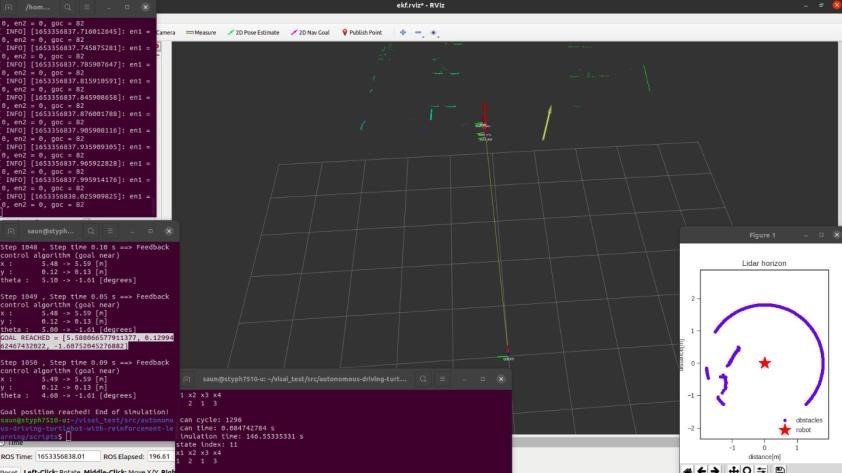
Kết quả hiển thị trên màn hình khi robot đã đi đến được điểm đích.

Vị trí robot ở điểm đích khi robot kết thúc quá trình
Ở trường hợp này, sau khi thực hiện quá trình di chuyển đến điểm goal, hệ thống đã tính toán ra vị trí của điểm goal với tên hiển thị là “GOAL REACHED”

Nhóm tiến hành đánh giá thử nghiệm
Đánh giá thực nghiệm cho thấy: Hệ thống đã hoạt động ổn định, cho thời gian đáp ứng đến vị trí điểm đặt nhanh; Thực hiện được yêu cầu phát hiện và tránh các vật cản trên đường di chuyển với môi trường không xác định, robot chưa biết vị trí vật cản và không gian cũng như biên dạng của môi trường làm việc; Các sai lệch khi xác định toạ độ điểm goal chủ yếu là góc quay θ của robot; So sánh với phương pháp định vị robot truyền thống khác, phương pháp đề xuất có độ ổn định cao, thời gian đáp ứng nhanh và tích hợp thêm được tác vụ tránh vật cản khi di chuyển, robot không bị ảnh hưởng bởi các biên dạng vật cản khác nhau.
Đề tài được Hội đồng đánh giá cao, với 92,4 điểm đã xuất sắc giành Giải Nhất cuộc thi sinh viên nghiên cứu khoa học lần thứ XIII.